
® MK03


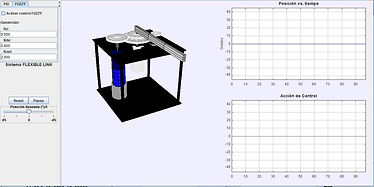
figura 1.
1. al abrir la simulación del flexy link podemos acceder a una ventana donde podremos visualizar la planta que vamos a controlar, en la parte inferior encontramos el modelo matemático y una opción llamada "CONTROL DE POSICIÓN" que al ser activada nos llevará a los diferentes tipos de control automático diseñados para esta planta
figura 3.
3. en la parte inferior de la zona izquierda veremos un deslizador con el que podremos especificar la posicion angular que queremos alcanzar con nuestra planta, esta posicion tiene un rango de menos 45 a 45 grados que son los limites permisibles por el modelo real de la planta
figura 2.
2. al activar la opcion de control de posicion accederemos a una nueva ventana con 3 paneles principales.
En el panel izquierdo veremos dos sub pestañas, "PID" y "Fuzzy", en ellas se configuran los parametros de cada opcion de control que sea requerida, en el panel central se muestra la animacion en tiempo real de la planta de modo que veremos las variables fisicas del sistema actuando en nuestro modelo directamente, por ultimo nos encontramos con el panel donde se disponen las graficas de las variables donde se puede analizar
